基于 Robei EDA 工具的可重构智能陪护机器人设计
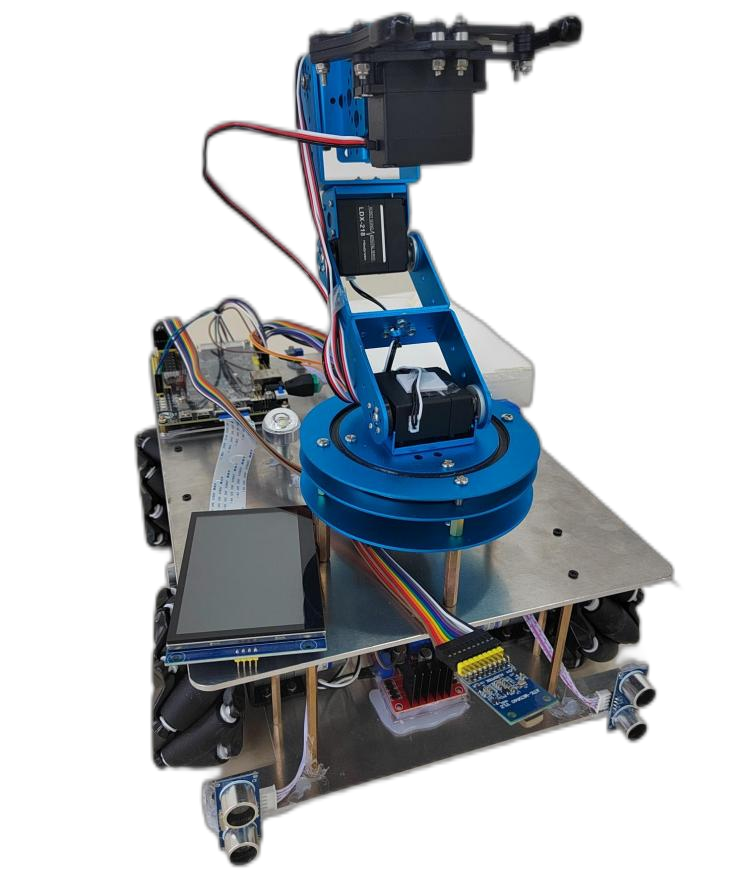
概要[Abstract]随着科技的不断发展,老年人的陪护工作正由人工迈向智能化。为了提高医护人员的工作效率、保障老年人的生活体验,本团队设计了一种基于Robei EDA 工具的可重构智能陪护机器人。设计基于 Robei EDA 工具进行 FPGA开发,实现视觉、语音、超声测距、光线、温度和湿度的多传感信息融合。同时,配合多自由度机械臂控制与运动避障控制,实现高灵敏与可靠性并存的智能陪护,可以完成人机交互、自动避障、药物运输、温湿度显示、自动照明等看护工作。经过模拟环境测试,显示该机器人可以满足预期的看护需求,且系统可重构行和算法可移植性强,通过适当改造,可适应不同环境与需求。
下载[Download]:design/25a0e465bd489137127b02809b75c26c.zip
 TEL:+86-18562888017
TEL:+86-18562888017
 Email: robei[at]robei.com
Email: robei[at]robei.com
 Email: visualchip
Email: visualchip